Learning Transferable Sub-goals by Hypothesizing Generalizing Features
Oct 1, 2024·,,,,,·
0 min read
Anita De Mello Koch
Akhil Bagaria
Bingnan Huo
Cameron Allen
Zhiyuan Zhou
George Konidaris
Abstract
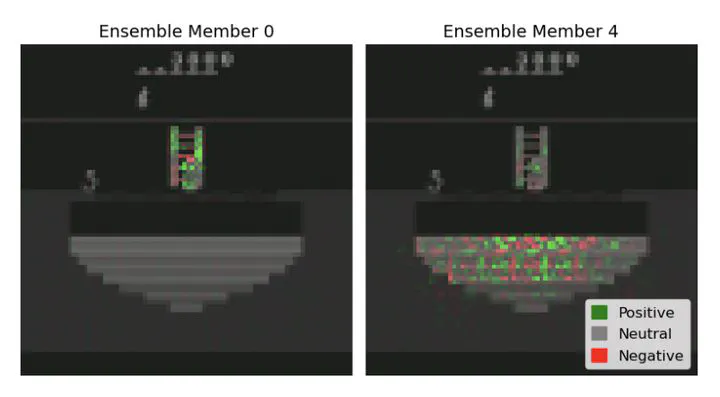
Transfer is a key promise of hierarchical reinforcement learning, but requires first learning transferable skills. For an agent to effectively transfer a skill it must identify features that generalize and define the skill over this subset. However, this task is under-specified from a single context as the agent has no prior knowledge of what future tasks may be introduced. Since successful transfer requires a skill to reliably achieve a sub-goal from different states, we focus our attention on ensuring sub-goals are represented in a transferable way. For each sub-goal, we train an ensemble of classifiers while explicitly incentivizing them to use minimally overlapping features. Each ensemble member represents a unique hypothesis about the transferable features of a sub-goal that the agent can use to learn a skill in previously unseen portions of the environment. Environment reward then determines which hypothesis is most transferable for the given task, based on the intuition that useful sub-goals lead to better reward maximization. We apply these reusable sub-goals to MiniGrid and Montezuma’s Revenge, allowing us to learn previously defined skills in unseen parts of the state-space.
Type
Publication
International Conference on Learning Representations