About Me
Hi! I am Bingnan Huo (霍秉楠), a masters student in Data Science at Brown University. I am a member of the Intelligent Robotics Lab, led by Prof. George Konidaris, where I conduct research on reinforcement learning and robotics. My current work focuses on option generalization under the Hierarchical Reinforcement Learning framework, aiming to develop reusable skills for robotic applications.
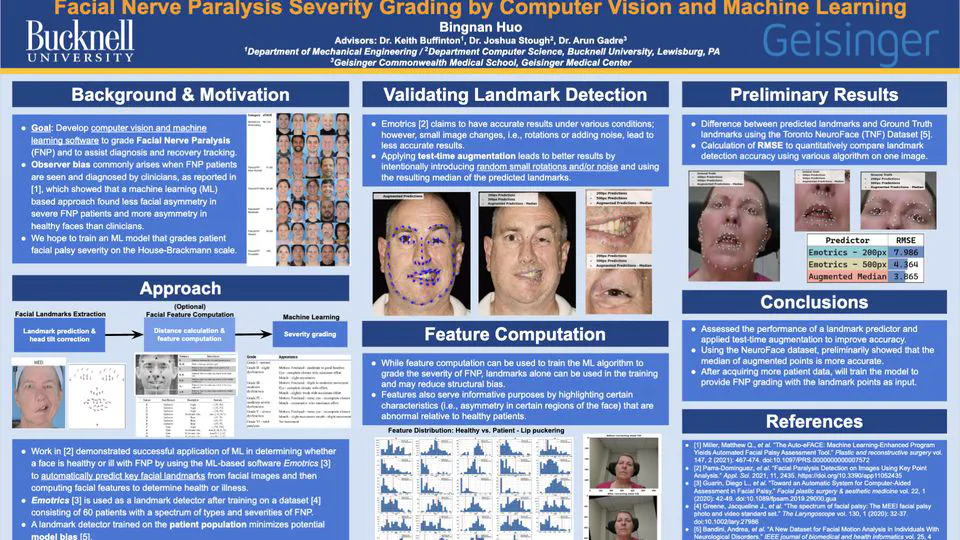
I have contributed to multiple research projects, including a paper submitted to ICLR 2025 on learning transferable subgoals, and I’m currently leading a project on applying these concepts to robotic motion planning using the Franka Emika Panda robot. Previously, I worked on medical image processing using computer vision and machine learning at Bucknell University, where I developed a system for diagnosing Facial Nerve Paralysis with over 80% accuracy.
My research interests lie at the intersection of artificial intelligence, reinforcement learning, and robotics, with a particular focus on developing AI systems that can learn and adapt to solve complex real-world tasks. I am passionate about bridging the gap between theoretical advances in AI and practical applications in robotics.
- Artificial Intelligence
- Reinforcement Learning
- Robotics
- Psychology & Sociology
Sc.M. Data Science
Brown University
B.S. Statistics
Bucknell University
I am a masters student in Data Science at Brown University, where I am part of the Intelligent Robotics Lab led by Prof. George Konidaris. My research focuses on developing intelligent robotic systems that can learn and adapt to solve complex real-world tasks.
Currently, I am working on:
- Option generalization under Hierarchical Reinforcement Learning framework for learning reusable robotic skills
- Applying transferable subgoals with motion planning for skill generalization across tasks using the Franka Emika Panda robot
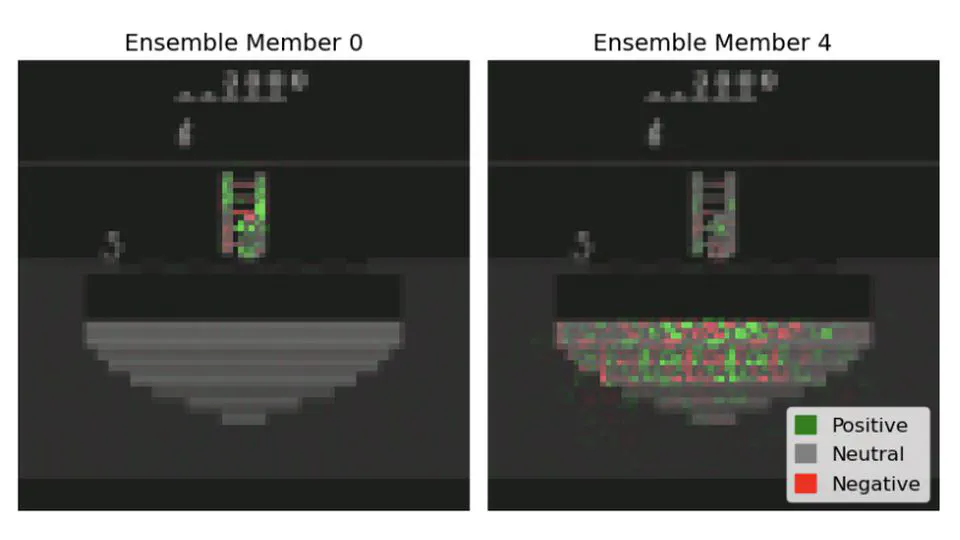
- Developing novel approaches for learning transferable subgoals as option termination classifiers (ICLR 2025 submission)
Previously at Bucknell University, I worked on medical image processing using computer vision and machine learning, developing a system for diagnosing Facial Nerve Paralysis with over 80% accuracy.
I am actively seeking collaborations in reinforcement learning, robotics, and AI. Feel free to reach out! 📫
Recent research work in reinforcement learning, robotics, and machine learning.